MIDCA
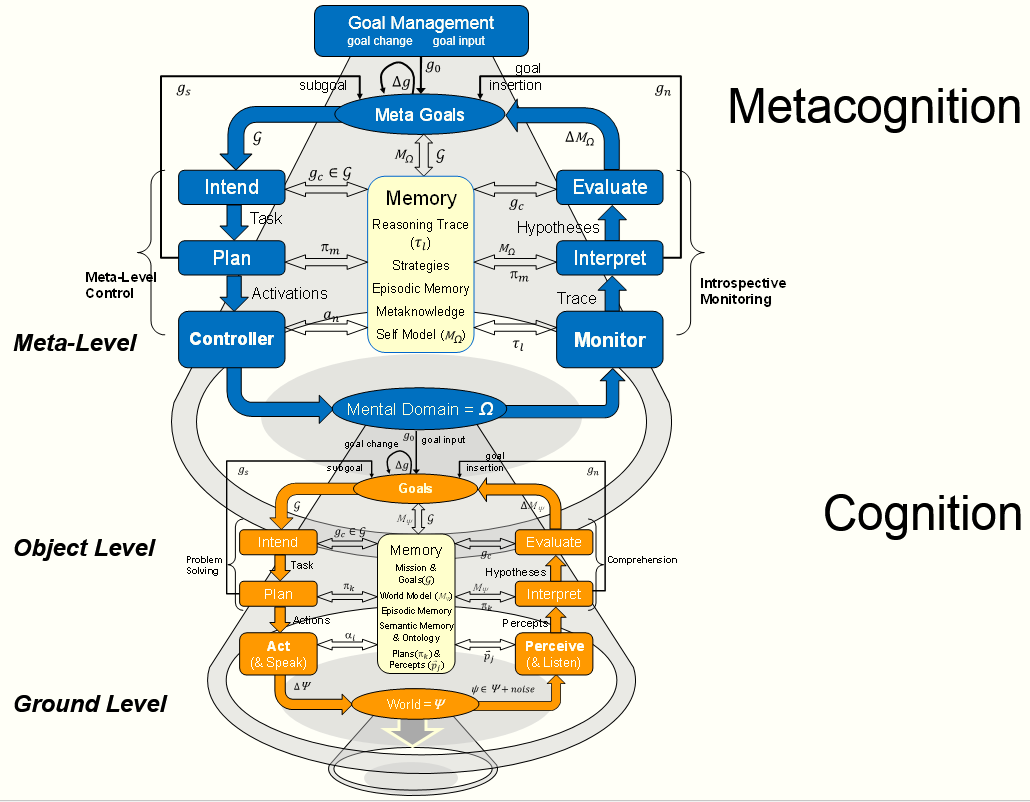
MIDCA consists of action-perception
cycles at both the cognitive (i.e., object) level and the metacognitive (i.e., meta-) level (see Figure 1). The output side of each cycle consists of intention, planning, and action execution, whereas the input side consists of perception, interpretation, and goal evaluation. A cycle selects a goal and commits to achieving it. The agent then creates a plan to achieve the goal and subsequently executes the planned actions to make the domain match the goal state. The agent perceives changes to the environment resulting from the actions, interprets the percepts with respect to the plan, and evaluates the interpretation with respect to the goal.
At the object level, the cycle achieves goals that change the environment (i.e., ground level). At the meta-level, the cycle achieves goals that change the object level. That is, the metacognitive perception
components introspectively monitor the processes and mental state changes at the cognitive level. The action
component consists of a meta-level controller that mediates reasoning over an abstract representation of the object level cognition.